
Lloyd Cleary-Richards
Researcher

Chris Snider
Senior Lecturer

TURA investigators visit Bristol
From the 21st to the 24th June, I was very glad to host some of the co-investigators (Dr. Aleksandra Kristikj, Dr Giacomo Barbeiri and Associate Professor Freddy Zapata) from our WUN funded, Transdisciplinary Urban Agriculture (TURA) project in Bristol where we progressed work on the project and visited a range of agricultural sites in Bristol […]

UK-Colombia collaboration and WUN bid submission
I returned to visit la Universidad de Los Andes (Uniandes) in August this year after a pandemic induced hiatus. Prior to 2020, we had been working with Uniandes to develop proposals to do with agritech and transdisciplinary engineering. During the pandemic we were able to manage some collaboration through project clean access (leading to a […]

21st Century Prototyping exhibit at ICED 2023
Setting the stage to show the community our technical capabilities and upcoming research, this week the 21CP team exhibited a range of demos at the ICED 2023 conference! We had three sets of demos up and running for attendees to try: Design in VR: Aman led the charge with a demo showing the different ways […]
IDEA challenge 2023
The IDEA challenge returned in May 2023 for its third iteration! This time it was hosted by the University of Zagreb and building on the success of the the challenge’s first two iterations was set to be bigger and better than ever! The challenge saw teams working fully virtually to develop a CubeSat satellite that […]

21st Century Prototyping at the ProSquared Network+ Launch
This week Chris and the team joined the launch event for the new ProSquared Network on the Democratisation of Digital Devices. This 5-year network aims to connect industry and academia to find new ways to overcome production barriers at lower volumes, by making design, prototyping, and manufacture faster and more efficient. Doing so will be […]

DMF @ DCC’22
The DMF attended the tenth International Conference on Design Cognition and Computing (DCC’22) in Glasgow and received the best poster prize and runner up in the best paper award!
Technical Debt – No Time To Pay
In recent years there has been a lot of talk about technical debt in various fields. Technical debt is the cost that an individual or a group of people will incur in future for hasty decisions in the present, which are often motivated by lack of resources and/or time. Photo by Scott Umstattd on Unsplash […]
Facemask to Filament: 3D Printing with Recycled Facemasks
Photography courtesy of Peter Rosso As a first line of defence against the spread of COVID-19 the facemask, a simple covering worn to reduce the spread of infectious agents, has affected the lives of billions across the globe. An estimated 129 billion facemasks are used every month, of which, most are designed for single use. […]
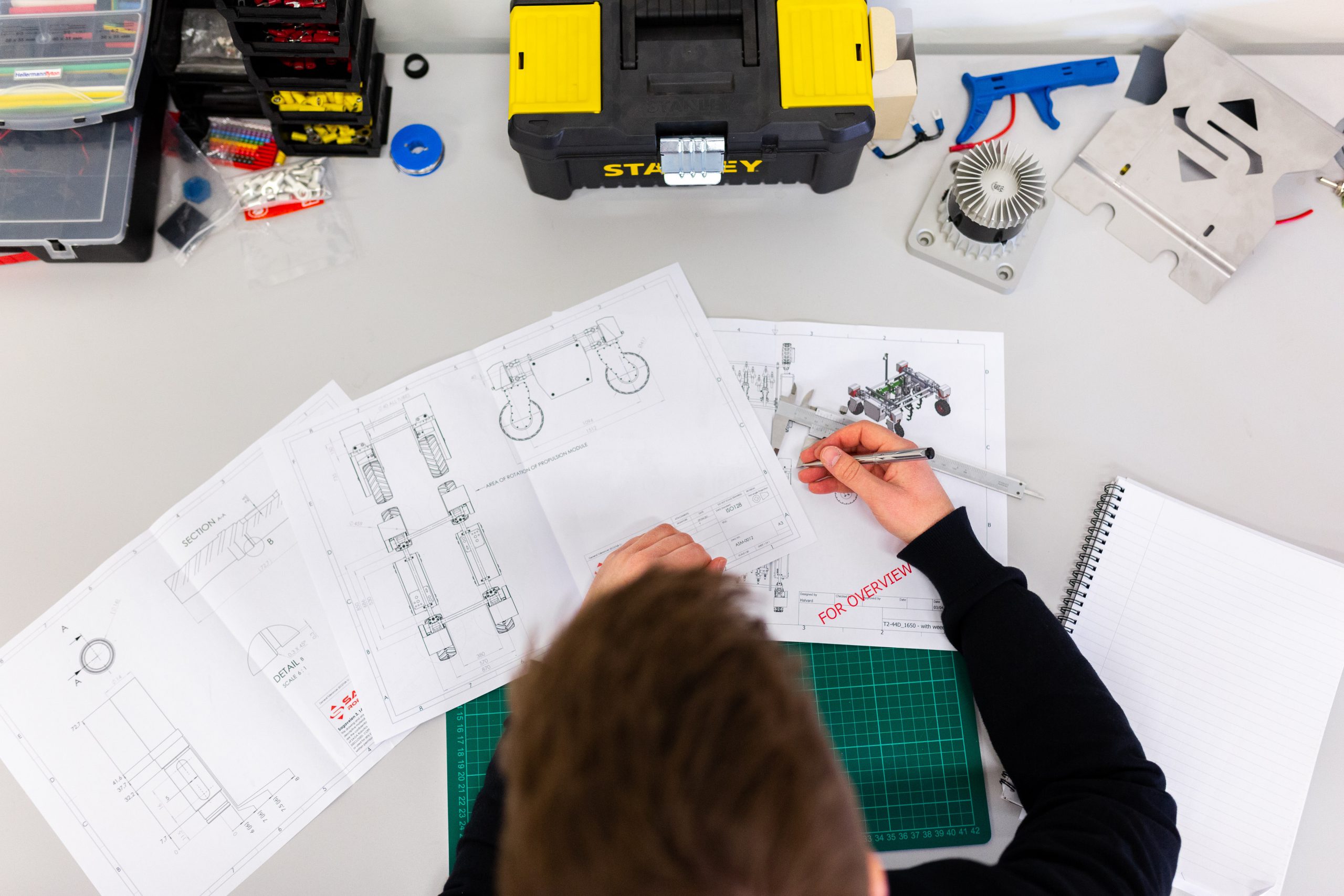
Demystifying Digital “X” – ICED Conference Paper
The DMF lab recently (remotely) attended the International Conference of Engineering Design (ICED) 2021 to present seven papers. One of these, authored by Chris Cox, Ben Hicks and James Gopsill, investigates the new language surrounding the paradigm shift towards digital engineering. This presentation was shown at ICED 2021 as part of the “Digital Twins” panel, […]