

Lloyd Cleary-Richards
Researcher

Chris Snider
Senior Lecturer

TURA investigators visit Bristol
From the 21st to the 24th June, I was very glad to host some of the co-investigators (Dr. Aleksandra Kristikj, Dr Giacomo […]

UK-Colombia collaboration and WUN bid submission
I returned to visit la Universidad de Los Andes (Uniandes) in August this year after a pandemic induced hiatus. Prior to 2020, […]

21st Century Prototyping exhibit at ICED 2023
Setting the stage to show the community our technical capabilities and upcoming research, this week the 21CP team exhibited a range of […]
IDEA challenge 2023
The IDEA challenge returned in May 2023 for its third iteration! This time it was hosted by the University of Zagreb and […]

21st Century Prototyping at the ProSquared Network+ Launch
This week Chris and the team joined the launch event for the new ProSquared Network on the Democratisation of Digital Devices. This […]

DMF @ DCC’22
The DMF attended the tenth International Conference on Design Cognition and Computing (DCC’22) in Glasgow and received the best poster prize and runner up in the best paper award!
Technical Debt – No Time To Pay
In recent years there has been a lot of talk about technical debt in various fields. Technical debt is the cost that […]
Facemask to Filament: 3D Printing with Recycled Facemasks
Photography courtesy of Peter Rosso As a first line of defence against the spread of COVID-19 the facemask, a simple covering worn […]
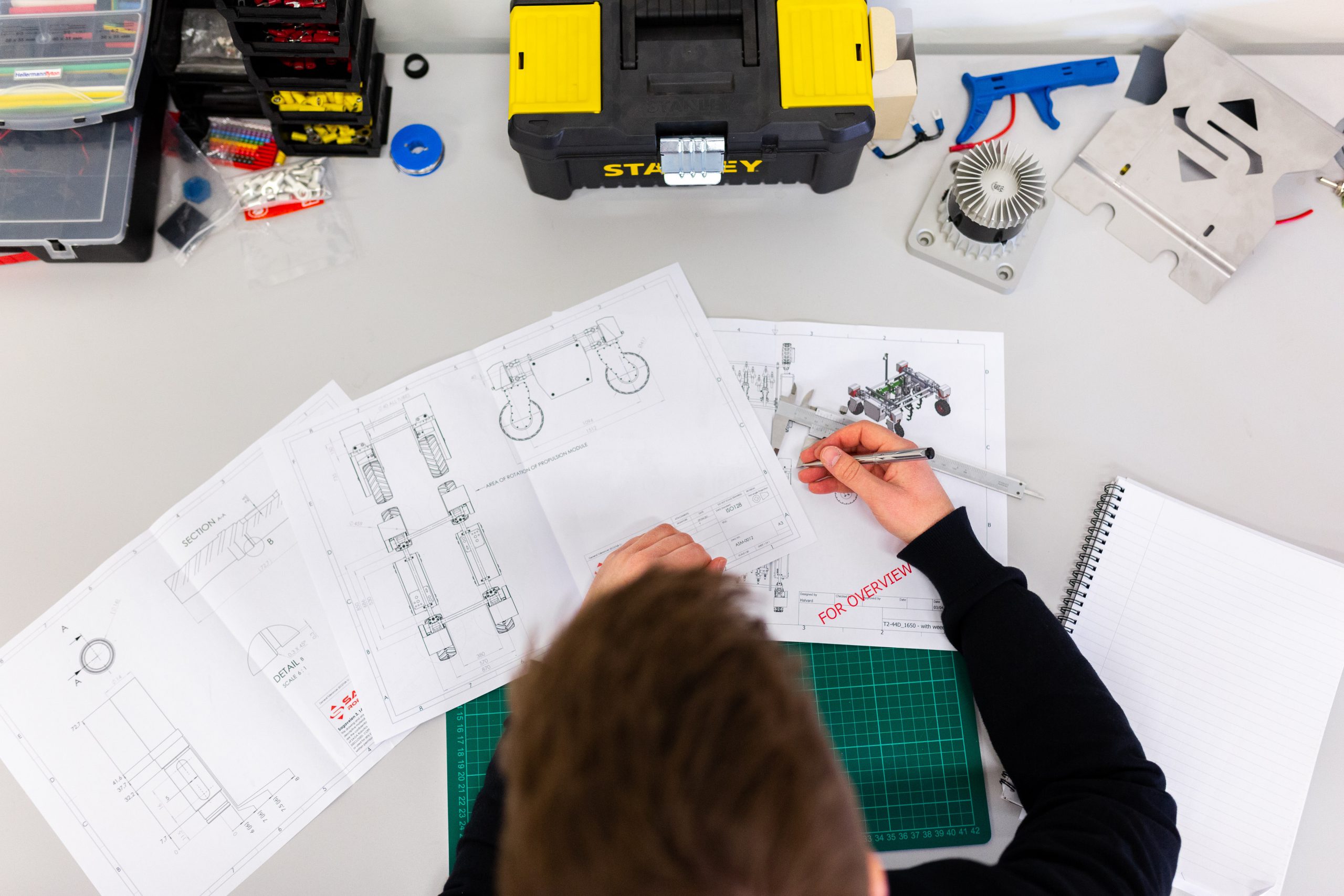
Demystifying Digital “X” – ICED Conference Paper
The DMF lab recently (remotely) attended the International Conference of Engineering Design (ICED) 2021 to present seven papers. One of these, authored […]